MicroGPT in F# — Part 1: How Karpathy's GPT Works
How Andrej Karpathy's single-file GPT works: autograd, the transformer forward pass, and a Python vs F# comparison of every key piece.
MicroGPT in F#
Andrej Karpathy’s microgpt is a ~200-line Python script that implements a GPT from scratch — no PyTorch, no NumPy, no frameworks of any kind. Just raw autograd, a transformer loop, and the essentials. It’s a masterpiece for understanding how language models actually work.
Martin Škuta then ported it to C# with serious .NET performance work: SIMD vectorization, iterative backward pass, zero-allocation hot paths, and loop unrolling.
This post is about my F# port that builds on that optimized C# foundation while embracing idiomatic F# design.
How Karpathy’s GPT Works
The Python original is deliberately minimal — every line teaches something. Let’s go through the key pieces comparing Python and F# side by side.
Autograd: Teaching a Number to Remember How It Was Born
The entire system is built on a single class — Value — which wraps a float and records the computation graph that produced it.
Python:
1
2
3
4
5
6
7
8
import math
class Value:
def __init__(self, data, _children=(), _local_grads=()):
self.data = float(data)
self.grad = 0.0
self._children = list(_children)
self._local_grads = list(_local_grads)
F#:
1
2
3
4
5
6
7
8
type Value(data: float, children: Value[], localGrads: float[]) =
let mutable _data = data
let mutable _grad = 0.0
member _.Data with get() = _data and set(v) = _data <- v
member _.Grad with get() = _grad and set(v) = _grad <- v
member _.Children = children
member _.LocalGrads = localGrads
The key difference: F# uses an array float[] for localGrads instead of a list. Arrays are contiguous in memory — critical for the SIMD optimization we’ll see later.
Operators: Where the Chain Rule Lives
Every arithmetic operation creates a new Value storing the result and the local partial derivatives of its inputs. This is the chain rule baked directly into the data structure.
Python:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
def __add__(self, other):
other = other if isinstance(other, Value) else Value(other)
return Value(self.data + other.data,
[self, other],
[1.0, 1.0]) # ∂(a+b)/∂a = 1, ∂(a+b)/∂b = 1
def __mul__(self, other):
other = other if isinstance(other, Value) else Value(other)
return Value(self.data * other.data,
[self, other],
[other.data, self.data]) # ∂(ab)/∂a = b, ∂(ab)/∂b = a
def pow(self, exp):
return Value(self.data ** exp,
[self],
[exp * self.data ** (exp - 1)]) # ∂(x^n)/∂x = n·x^(n-1)
def log(self):
return Value(math.log(self.data),
[self],
[1.0 / self.data]) # ∂log(x)/∂x = 1/x
def exp(self):
e = math.exp(self.data)
return Value(e, [self], [e]) # ∂e^x/∂x = e^x
def relu(self):
return Value(max(0, self.data),
[self],
[1.0 if self.data > 0 else 0.0])
F#:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
static member (+)(a: Value, b: Value) =
Value(a.Data + b.Data, [|a; b|], [|1.0; 1.0|])
static member (*)(a: Value, b: Value) =
Value(a.Data * b.Data, [|a; b|], [|b.Data; a.Data|])
member this.Pow(other: float) =
Value(Math.Pow(_data, other),
[|this|],
[|other * Math.Pow(_data, other - 1.0)|])
member this.Log() =
Value(Math.Log(_data), [|this|], [|1.0 / _data|])
member this.Exp() =
let e = Math.Exp _data
Value(e, [|this|], [|e|])
member this.Relu() =
Value(Math.Max(0.0, _data),
[|this|],
[|if _data > 0.0 then 1.0 else 0.0|])
Both versions encode the same calculus. The F# version uses static operator overloading instead of dunder methods, and [|...|] (array literals) instead of Python lists.
Backward Pass: Propagating Gradients
Once the forward pass completes and produces a loss, backward() walks the computation graph in reverse topological order, multiplying local gradients by upstream gradients (the chain rule):
1
2
3
4
loss.grad = 1.0
for each node v (in reverse topo order):
for each child c of v:
c.grad += v.grad * local_grad(v → c)
Python (recursive DFS):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
def backward(self):
topo = []
visited = set()
def build_topo(v):
if v not in visited:
visited.add(v)
for child in v._children:
build_topo(child) # ← recursive call
topo.append(v)
build_topo(self)
self.grad = 1.0
for v in reversed(topo):
if v.grad != 0.0:
for child, lg in zip(v._children, v._local_grads):
child.grad += lg * v.grad
F# (iterative DFS with explicit stack):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
member this.Backward
(topo: ResizeArray<Value>, visited: HashSet<Value>,
stack: Stack<struct (Value * int)>) =
stack.Push(struct (this, 0))
while stack.Count > 0 do
let struct (current, childIndex) = stack.Pop()
let ch = current.Children
if ch.Length > 0 && childIndex < ch.Length then
stack.Push(struct (current, childIndex + 1))
let child = ch.[childIndex]
if visited.Add child then
stack.Push(struct (child, 0))
else
topo.Add current
this.Grad <- 1.0
for topoIdx = topo.Count - 1 downto 0 do
let v = topo.[topoIdx]
let vGrad = v.Grad
if vGrad <> 0.0 then
let ch = v.Children
let lg = v.LocalGrads
let len = ch.Length
match len with
| 1 -> ch.[0].Grad <- ch.[0].Grad + lg.[0] * vGrad
| 2 -> ch.[0].Grad <- ch.[0].Grad + lg.[0] * vGrad
ch.[1].Grad <- ch.[1].Grad + lg.[1] * vGrad
| _ -> for i in 0 .. len - 1 do
ch.[i].Grad <- ch.[i].Grad + lg.[i] * vGrad
Python’s version is elegant but recursive — for a deep computation graph (many layers × long sequences), it will hit the call stack limit. The F# version simulates the same DFS with an explicit Stack, avoiding that limit entirely. More on this in the optimizations section.
Utility Functions: softmax and rmsNorm
These are the building blocks used inside the transformer.
Python:
1
2
3
4
5
6
7
8
9
10
11
def softmax(logits):
max_val = max(v.data for v in logits) # numerical stability
exps = [(v - max_val).exp() for v in logits]
total = sum(exps, Value(0.0))
return [e / total for e in exps]
def rms_norm(x):
sum_sq = sum((xi * xi for xi in x), Value(0.0))
ms = sum_sq / len(x)
scale = (ms + 1e-5).pow(-0.5)
return [xi * scale for xi in x]
F#:
1
2
3
4
5
6
7
8
9
10
11
let softmax (logits: ResizeArray<Value>) =
let maxVal = logits |> Seq.map (fun v -> v.Data) |> Seq.max
let exps = ResizeArray(logits |> Seq.map (fun v -> (v - maxVal).Exp()))
let total = exps |> Seq.fold (fun acc e -> acc + e) (Value 0.0)
ResizeArray(exps |> Seq.map (fun e -> e / total))
let rmsNorm (x: ResizeArray<Value>) =
let sumSq = x |> Seq.fold (fun acc xi -> acc + xi * xi) (Value 0.0)
let ms = sumSq / float x.Count
let scale = (ms + 1e-5).Pow(-0.5)
ResizeArray(x |> Seq.map (fun xi -> xi * scale))
The logic is identical. The F# version reads left-to-right with |> pipelines; Python uses list comprehensions.
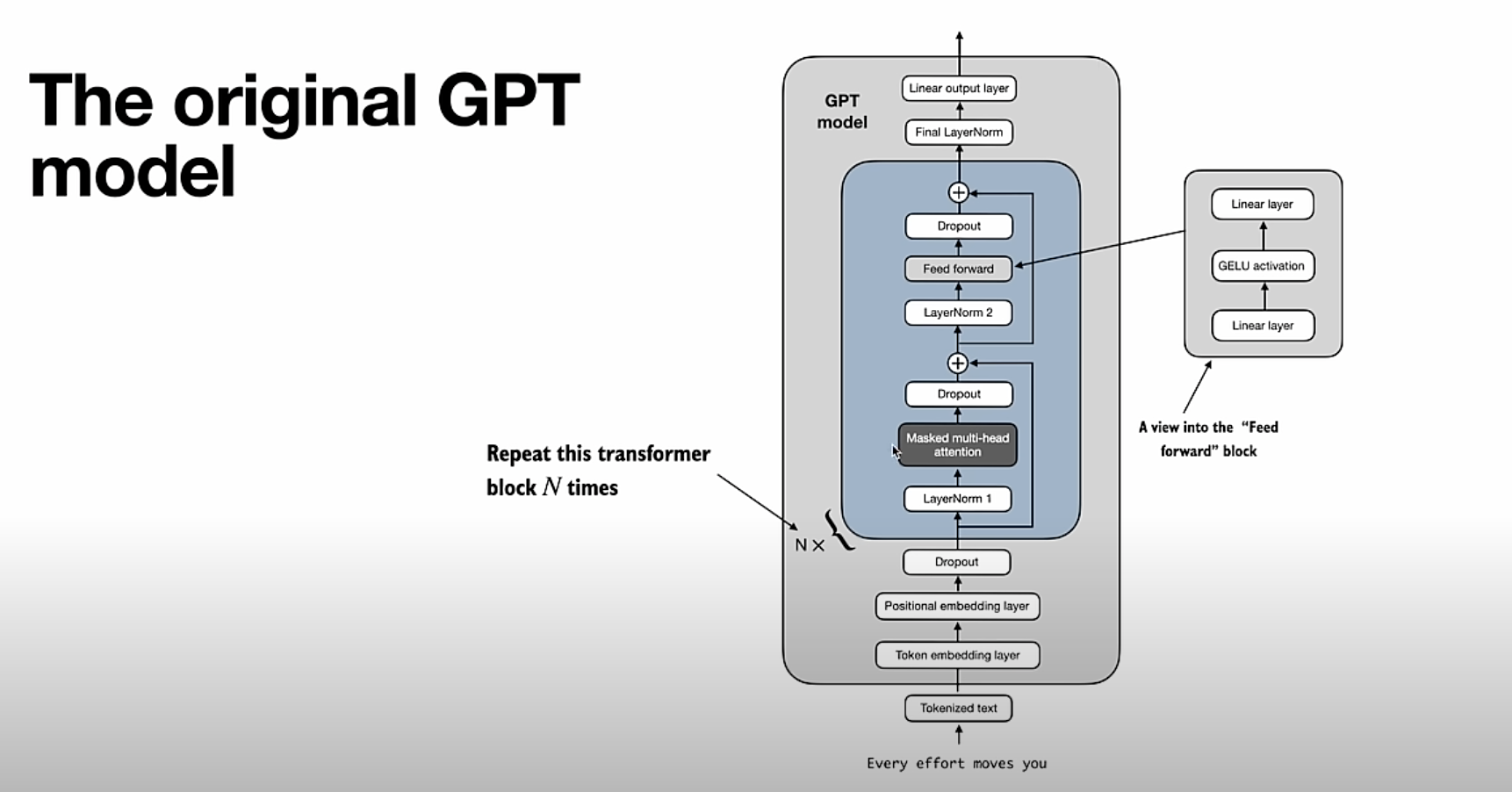
The Transformer: gpt()
The gpt function is the heart of the model. It takes one token and its position, and returns a vector of logits — one score per vocabulary token, representing “how likely is this token to come next?”. Let’s go through each step.
Step 1 — Token + Positional Embeddings
Each token id maps to a learned vector (what the token means). Each position id maps to another learned vector (where the token is in the sequence). They are added together to form the initial representation x.
Python:
1
2
3
4
tok_emb = state["wte"][token_id] # shape: [n_embd]
pos_emb = state["wpe"][pos_id] # shape: [n_embd]
x = [t + p for t, p in zip(tok_emb, pos_emb)]
x = rms_norm(x)
F#:
1
2
3
4
5
let tokEmb = stateDict.["wte"].[tokenId] // shape: [nEmbd]
let posEmb = stateDict.["wpe"].[posId] // shape: [nEmbd]
let mutable x =
ResizeArray(Array.init nEmbd (fun i -> tokEmb.[i] + posEmb.[i]))
x <- rmsNorm x
After adding both embeddings, RMS normalization scales x so its values don’t explode as they flow through the network. Think of it as a reset before each layer — the model learns what to emphasize, not just raw magnitudes.
Step 2 — Q, K, V Projections
For each transformer layer, we first save the current x as a residual (to add back later), then project x into three separate spaces: Query, Key, and Value. These are just learned linear transformations — three weight matrices multiplied by x.
Python:
1
2
3
4
5
6
7
8
9
x_residual = list(x)
x = rms_norm(x)
q = linear(x, state[f"layer{li}.attn_wq"]) # What am I looking for?
k = linear(x, state[f"layer{li}.attn_wk"]) # What do I contain?
v = linear(x, state[f"layer{li}.attn_wv"]) # What will I contribute?
keys[li].append(k) # KV cache: remember all past keys
values[li].append(v) # KV cache: remember all past values
F#:
1
2
3
4
5
6
7
8
9
let xResidual = ResizeArray x
x <- rmsNorm x
let q = linear x stateDict.[sprintf "layer%d.attn_wq" li]
let k = linear x stateDict.[sprintf "layer%d.attn_wk" li]
let v = linear x stateDict.[sprintf "layer%d.attn_wv" li]
keys.[li].Add k // KV cache
values.[li].Add v
The KV cache (keys[li], values[li]) accumulates all past keys and values. At position t, the model can look at every previous token — this is the “context window” in action.
linear is just a matrix-vector product: for each row w in the weight matrix, compute dot(w, x) and collect the results. The result has the same dimension as x (n_embd).
Step 3 — Multi-Head Scaled Dot-Product Attention
This is the most important part. Instead of one attention mechanism over the full n_embd dimension, we split into n_head independent heads, each operating on a head_dim = n_embd / n_head slice. Each head learns to attend to different aspects of the context.
For each head h:
- Extract the
head_dim-sized slice of Q from positionh * head_dim - For every past token
t, compute a dot product between current Q and past K — this is the “how relevant is token t to my current query?” score - Divide by
√head_dim(scaled dot-product) — without this scaling, dot products grow withhead_dimbecause they are a sum ofhead_dimmultiplications. Large values push softmax into saturation regions where gradients vanish to near zero, making training unstable - Softmax over all scores to get attention weights (they sum to 1)
- Compute the weighted sum of all past V vectors — the output is “what I should attend to”
Python:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
x_attn = []
for h in range(n_head):
hs = h * head_dim
q_h = q[hs : hs + head_dim] # query for this head
T = len(keys[li]) # number of past tokens
# Score: how much does current token attend to each past token?
attn_logits = []
for t in range(T):
k_h = keys[li][t][hs : hs + head_dim]
dot = sum(qi * ki for qi, ki in zip(q_h, k_h))
attn_logits.append(dot / math.sqrt(head_dim)) # scale
attn_weights = softmax(attn_logits) # probabilities over past tokens
# Weighted sum of values
head_out = [Value(0.0)] * head_dim
for t in range(T):
v_h = values[li][t][hs : hs + head_dim]
w = attn_weights[t]
for j in range(head_dim):
head_out[j] = head_out[j] + w * v_h[j]
x_attn.extend(head_out)
F#:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
let xAttn = ResizeArray<Value>()
for h in 0 .. nHead - 1 do
let hs = h * headDim
let qH = q.GetRange(hs, headDim) // query slice for this head
let T = keys.[li].Count // number of past tokens
// Score each past token against current query
let attnLogits = ResizeArray<Value>()
for t in 0 .. T - 1 do
let kH = keys.[li].[t].GetRange(hs, headDim)
let mutable dot = Value 0.0
for j in 0 .. headDim - 1 do
dot <- dot + qH.[j] * kH.[j]
attnLogits.Add(dot / Math.Sqrt(float headDim)) // scale
let attnWeights = softmax attnLogits // probabilities
// Weighted sum of values
let headOut = ResizeArray(Array.init headDim (fun _ -> Value 0.0))
for t in 0 .. T - 1 do
let vH = values.[li].[t].GetRange(hs, headDim)
let w = attnWeights.[t]
for j in 0 .. headDim - 1 do
headOut.[j] <- headOut.[j] + w * vH.[j]
xAttn.AddRange headOut
After the loop, xAttn contains the concatenated output of all heads — shape [n_embd].
Step 4 — Output Projection + First Residual
The concatenated attention output is projected back to n_embd via attn_wo, then added to the residual saved in Step 2. This residual connection is crucial — it lets gradients flow directly back through the network during training, preventing vanishing gradients.
Python:
1
2
x = linear(x_attn, state[f"layer{li}.attn_wo"]) # mix heads back together
x = [xi + ri for xi, ri in zip(x, x_residual)] # + residual
F#:
1
2
3
x <- linear xAttn stateDict.[sprintf "layer%d.attn_wo" li]
for i in 0 .. nEmbd - 1 do
x.[i] <- x.[i] + xResidual.[i] // + residual
Step 5 — MLP Block + Second Residual
Every transformer layer also has a feed-forward network (MLP) applied position-wise. It expands the dimension by 4× (mlp_fc1), applies a non-linearity, then compresses back (mlp_fc2). Another residual connection wraps it.
ReLU, not GELU. Modern transformers (GPT-2, GPT-3, LLaMA) use GELU as the MLP activation — it’s smooth and has non-zero gradients for slightly negative inputs, which improves training dynamics. microgpt deliberately uses ReLU (
max(0, x)) for simplicity: it’s dead-simple to implement in scalar autograd (gradient is exactly 0 or 1), and it’s enough for a character-level toy model. If you wanted to extend this to a larger model, swapping ReLU for GELU would be one of the first changes to make.
Python:
1
2
3
4
5
6
x_residual2 = list(x)
x = rms_norm(x)
x = linear(x, state[f"layer{li}.mlp_fc1"]) # expand: n_embd → 4*n_embd
x = [xi.relu() for xi in x] # ReLU (not GELU — intentional)
x = linear(x, state[f"layer{li}.mlp_fc2"]) # compress: 4*n_embd → n_embd
x = [xi + ri for xi, ri in zip(x, x_residual2)] # + residual
F#:
1
2
3
4
5
6
7
let xResidual2 = ResizeArray x
x <- rmsNorm x
x <- linear x stateDict.[sprintf "layer%d.mlp_fc1" li] // expand
x <- ResizeArray(x |> Seq.map (fun xi -> xi.Relu())) // ReLU (not GELU — intentional)
x <- linear x stateDict.[sprintf "layer%d.mlp_fc2" li] // compress
for i in 0 .. nEmbd - 1 do
x.[i] <- x.[i] + xResidual2.[i] // + residual
Why 4×? This is a heuristic from the original “Attention is All You Need” paper — empirically it gives enough capacity for the MLP to learn useful transformations without being too expensive.
Step 6 — Language Model Head
After all layers, x is a rich vector representation of the current token in its context. The final linear projection maps it to vocabulary size — one score per possible next token.
Python:
1
return linear(x, state["lm_head"]) # shape: [vocab_size]
F#:
1
linear x stateDict.["lm_head"] // shape: [vocabSize]
These raw scores are the logits. Pass them through softmax to get probabilities, then pick the highest-probability token (or sample from the distribution) to generate the next character.
Putting it all together, one forward pass looks like this:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
token_id, pos_id
│
▼
[tok_emb + pos_emb] → rmsNorm → x (shape: n_embd)
│
▼ (repeated n_layer times)
save x_residual
rmsNorm(x)
Q, K, V = linear(x, Wq), linear(x, Wk), linear(x, Wv)
append K, V to KV cache
for each head h:
score each past K against current Q → softmax → weights
weighted sum of past V → head_out
concat all heads → linear(attn_wo) + x_residual
save x_residual2
rmsNorm → linear(fc1) → relu → linear(fc2) + x_residual2
│
▼
linear(lm_head) → logits (shape: vocab_size)
Python vs F# at a Glance
| Component | Python (microgpt) | F# (this impl) | Advantage in F# |
|---|---|---|---|
| Autograd | Value class with Python lists | Value with flat float[] arrays | Better memory locality, SIMD-ready |
| Backward pass | Recursive DFS | Iterative with Stack<struct> | No stack overflow, zero heap alloc per node |
| Operators | Dunder methods (__mul__, __add__) | Static members + operator overloading | More idiomatic, composable |
| KV cache | Python lists with .append() | ResizeArray (controlled mutability) | Explicit mutation intent, same O(1) amortized |
| Activation | relu (scalar) | Relu() (scalar) | Identical — ReLU intentional for simplicity |
| Dot product | sum(a * b for a, b in zip(...)) | SIMD Vector<float> loop | 4× throughput on AVX2 |
| Data flow | Imperative rebinding | |> pipelines + explicit mutable | Mutation visible and localized |
| Composition | Lambdas / loops | Seq.map, Seq.fold, Array.init | Reads as a transformation pipeline |
Training Loop
Python:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
for step in range(num_steps):
doc = docs[step % len(docs)]
tokens = [bos] + [encode(c) for c in doc] + [bos]
n = min(block_size, len(tokens) - 1)
keys = [[] for _ in range(n_layer)]
values = [[] for _ in range(n_layer)]
losses = []
for pos_id in range(n):
token_id = tokens[pos_id]
target_id = tokens[pos_id + 1]
logits = gpt(token_id, pos_id, keys, values)
probs = softmax(logits)
losses.append(-probs[target_id].log())
loss = sum(losses, Value(0.0)) * (1.0 / n)
for p in params:
p.grad = 0.0
loss.backward()
# Adam update
lr_t = learning_rate * (1.0 - step / num_steps)
for i, p in enumerate(params):
m[i] = beta1 * m[i] + (1 - beta1) * p.grad
v[i] = beta2 * v[i] + (1 - beta2) * p.grad ** 2
m_hat = m[i] / (1 - beta1 ** (step + 1))
v_hat = v[i] / (1 - beta2 ** (step + 1))
p.data -= lr_t * m_hat / (math.sqrt(v_hat) + eps)
F#:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
for step in 0 .. numSteps - 1 do
let doc = docs.[step % docs.Count]
let tokens = ResizeArray<int>()
tokens.Add bos
tokens.AddRange(doc |> Seq.map encode)
tokens.Add bos
let n = min blockSize (tokens.Count - 1)
let keys = Array.init nLayer (fun _ -> ResizeArray<ResizeArray<Value>>())
let values = Array.init nLayer (fun _ -> ResizeArray<ResizeArray<Value>>())
let losses = ResizeArray<Value>()
for posId in 0 .. n - 1 do
let tokenId = tokens.[posId]
let targetId = tokens.[posId + 1]
let logits = gpt tokenId posId keys values
let probs = softmax logits
losses.Add(-probs.[targetId].Log())
let mutable loss = Value 0.0
for l in losses do loss <- loss + l
loss <- loss * (1.0 / float n)
for p in paramsList do p.Grad <- 0.0
topo.Clear()
visited.Clear()
stack.Clear()
loss.Backward(topo, visited, stack)
// Adam update with linear LR decay
let lrT = learningRate * (1.0 - float step / float numSteps)
for i in 0 .. paramsList.Length - 1 do
let p = paramsList.[i]
mArr.[i] <- beta1 * mArr.[i] + (1.0 - beta1) * p.Grad
vArr.[i] <- beta2 * vArr.[i] + (1.0 - beta2) * (p.Grad ** 2.0)
let mHat = mArr.[i] / (1.0 - beta1 ** float (step + 1))
let vHat = vArr.[i] / (1.0 - beta2 ** float (step + 1))
p.Data <- p.Data - lrT * mHat / (Math.Sqrt vHat + epsAdam)
One notable difference: in F# the topo, visited, and stack collections are allocated once outside the loop and .Clear()-ed each step. Python creates fresh objects every iteration. This is one of the zero-allocation optimizations — more on that next.
Continue in Part 2: .NET performance optimizations, F# vs C# idioms, training runs, and what it would take to scale.